Imitation Learning with low-cost robotic arm
Imagine a robotic arm that can learn to perform tasks just by watching human demonstrations!
Overview
This project demonstrates how low-cost robotic arms (Koch) can learn from human demonstrations using imitation learning by Action Chunking Transformer (ACT).
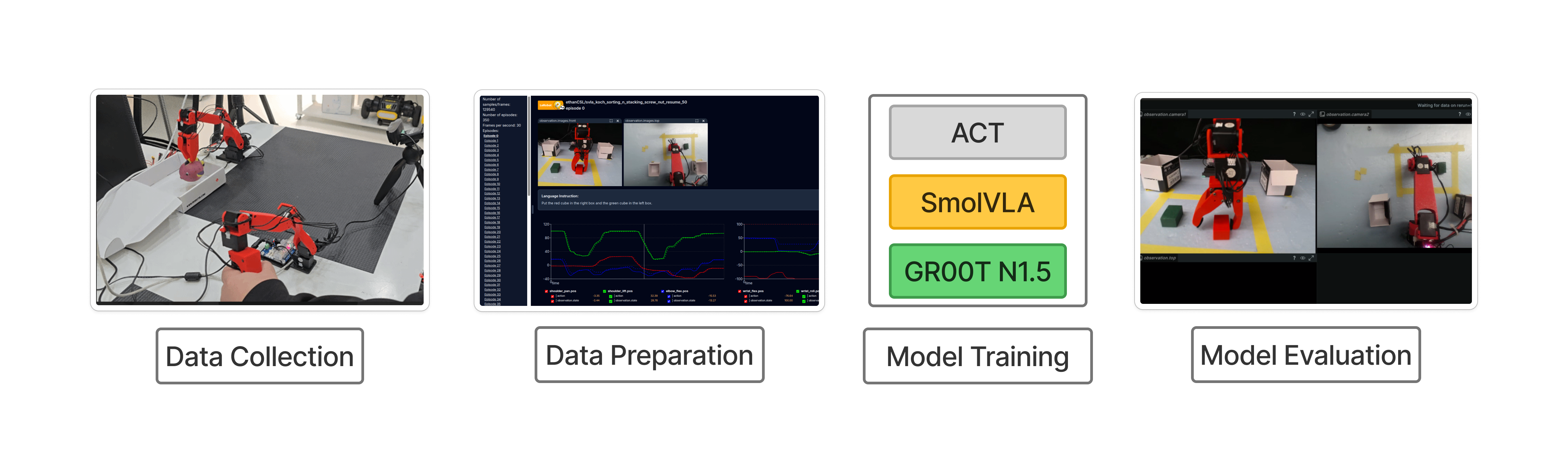
LeRobot Pipeline: Training imitation learning models by Koch robot
1. Data Collection
The first step is collecting high-quality demonstration data from human teleoperation.
Dataset Format
We use the LeRobot dataset format, which stores episodes as Parquet files containing observation(following robot joint states) , and action(leading arm's joint states) and mp4 for top and front camera observation.
# Robot Joint States (6-DOF)
- "shoulder_pan.pos"
- "shoulder_lift.pos"
- "elbow_flex.pos"
- "wrist_flex.pos"
- "wrist_roll.pos"
- "gripper.pos"
# Camera Observations
- "observation.images.front"
- "observation.images.top"
LeRobot dataset structure with joint positions and camera observations
Control Method
Human demonstrations are collected via teleoperation using a leader-follower setup, where the operator controls a leader arm and the follower arm mimics the movements.
Leader-follower teleoperation for data collection
2. Model Training
After collecting demonstration data, we train imitation learning models to predict robot actions from visual observations.
ACT (Action Chunking Transformer)
A pure imitation learning approach that predicts action sequences("chunks") rather than single actions . It uses a transformer encoder-decoder architecture with a CVAE (Conditional Variational Autoencoder) for modeling action distributions.
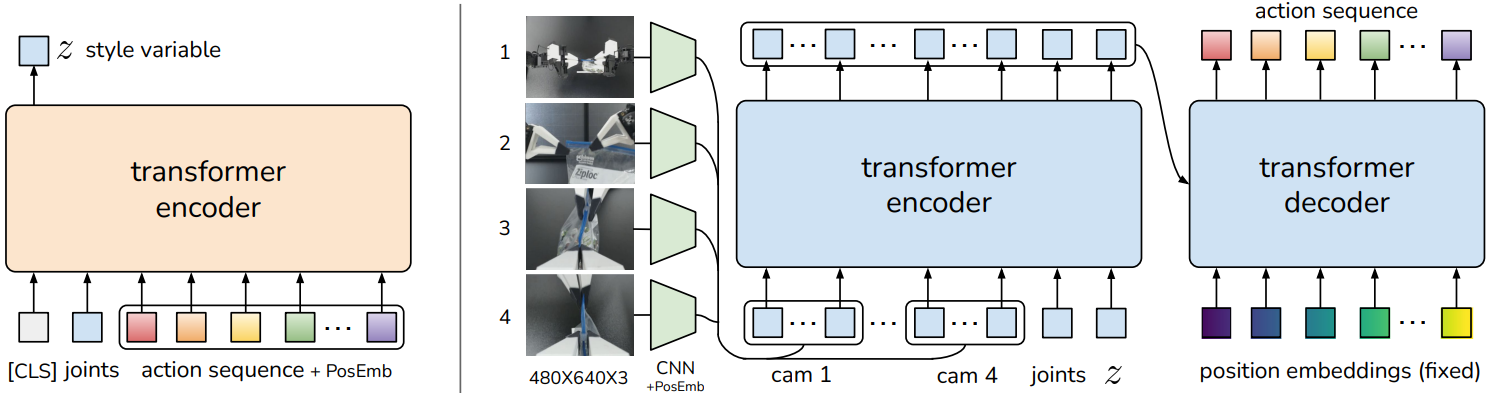
ACT Architecture (Source: ACT Paper)
✅ Strengths
- • Fast training (no VLM backbone)
- • Lightweight (~25M parameters)
- • Good for single-task learning
⚠️ Limitations
- • No language understanding
- • Requires task-specific training
- • Limited generalization
3. Deployment
The trained model is deployed on the robot for real-time inference and autonomous task execution.
Real-time Inference
The model runs at ~30Hz, predicting action chunks that are executed by the robot controller in real-time.
Autonomous task execution after 50 episodes training
Real-time action classification using the trained ACT model