Multi-map Switching System for TurtleBot Navigation
Developing a multi-map switching system for autonomous navigation of a TurtleBot in dynamic environments.
Overview
This project demonstrates how to implement a multi-map switching system for autonomous navigation of a TurtleBot3 in dynamic environments.
Multi-map Switching System
We implement a multi-map switching system that allows the TurtleBot3 to switch between different maps based on the current environment and task requirements.
The system is integrated with ROS2 Action Server and Nav2 framework for seamless navigation.
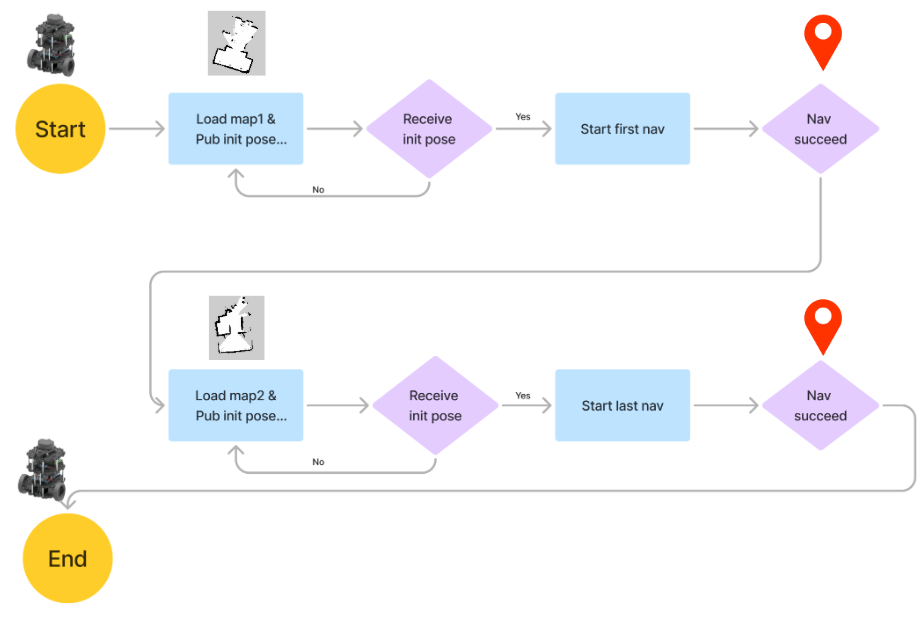
Multi-map switching system demonstration
Nav2 Service Integration
The Nav2 framework provides robust navigation services. Below demonstrates how the system loads different maps and performs navigation tasks.
Loading map 1 & initial pose
First navigation task
Loading map 2
Second navigation task
ROS2 Action
The multi-map switching system is implemented using ROS2 Action Server, allowing for asynchronous map loading and navigation execution.
Real-world Deployment
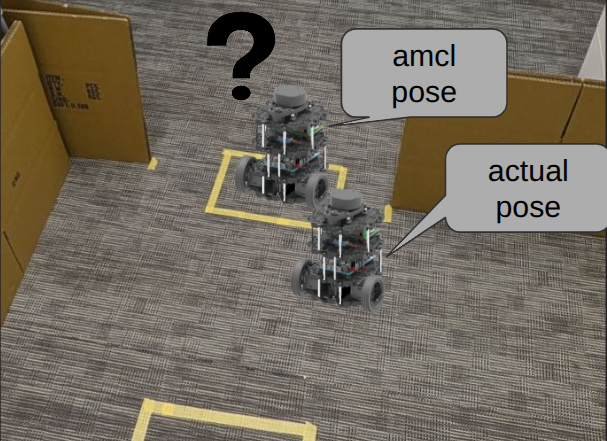
The multi-map switching system is deployed on a real TurtleBot3, demonstrating seamless navigation across different maps in a dynamic environment.
Real-world deployment of the multi-map switching system
AprilTag Localization and map switching
The system utilizes AprilTag markers for calibration between several waypoints, and help to switch between different maps.
The AprilTag markers are placed at key locations in the environment, and the robot uses them for accurate localization and map switching during navigation.
AprilTag calibration setup

AprilTag marker detection
AprilTag calibration demonstration