← Back to Portfolio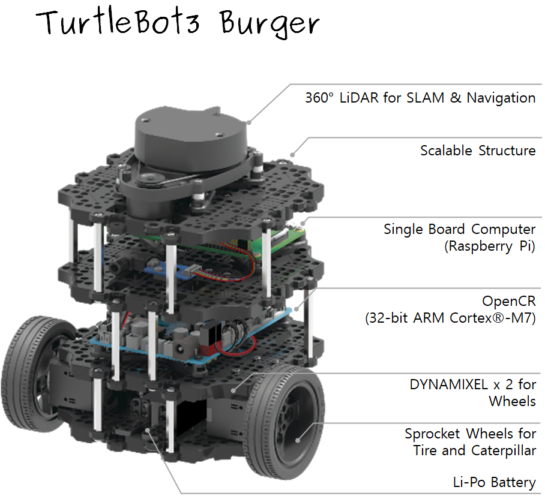
Hybrid A* algorithm for robot navigation
Developing a hybrid A* algorithm for autonomous navigation of a TurtleBot in dynamic environments.
Overview
This project demonstrates how to use Turtlebot3 for autonomous navigation in dynamic environments using a hybrid A* algorithm from simulation to real-world deployment.
Robot Setup
We use the TurtleBot3 Burger platform equipped with a LiDAR sensor for navigation.
TurtleBot3 Burger platform setup
Hybrid A* Algorithm(Sim2Real)
We implement a hybrid A* algorithm that combines grid-based A* and sampling-based RRT for efficient path planning in dynamic environments. The algorithm is tested in simulation and real-world scenarios.
Hybrid A* Algorithm visualization(Gazebo to Real-world)